Robots have made clear advances in vision, mobility, and sound recognition, yet their ability to sense touch with any real subtlety has remained limited. That gap has practical consequences. Without reliable tactile feedback, robots struggle to grasp delicate objects, adjust force in real time, or safely interact with people. Recent work by Ensuring Technologypoints toward a more refined approach, using artificial skin to give machines a richer understanding of physical contact.
The company’s artificial skin system is designed to capture pressure, texture, and contact dynamics across a surface, rather than at isolated points. Traditional robotic touch sensors typically register whether contact has occurred and, at best, how much force is being applied. Human skin, by contrast, continuously collects dense streams of data that allow instant micro-adjustments. Ensuring Technology’s work attempts to replicate that distributed sensing model in a form that can be integrated into robotic hardware.
Two products illustrate this direction: Tacta and HexSkin. Both are built around high-density sensor arrays and fast local processing, reflecting the idea that touch data must be interpreted immediately to be useful. When a human grip starts to slip, the response is reflexive. For robots, achieving anything similar requires both detailed input and rapid decision-making close to the sensor itself.

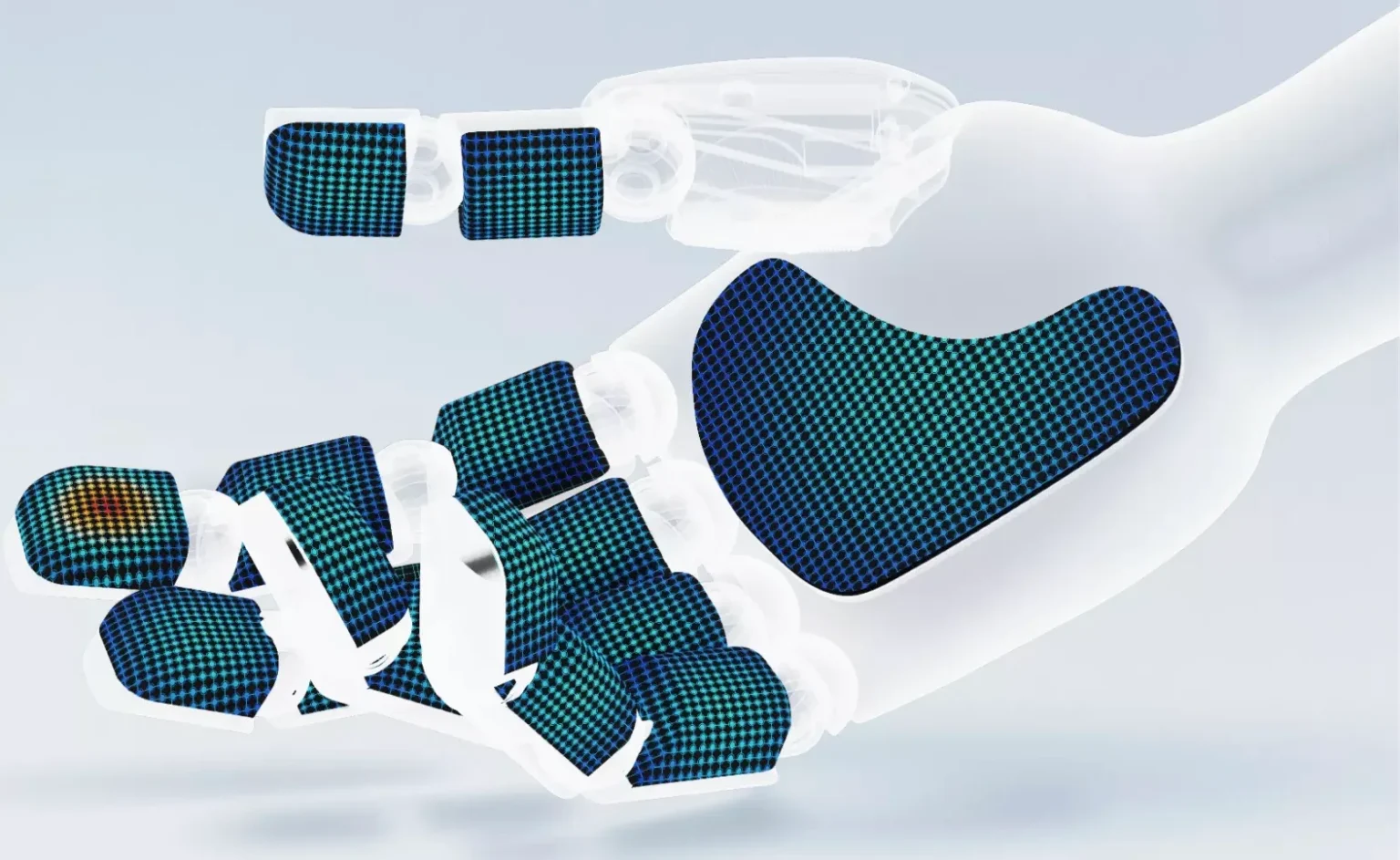
Tacta is intended for robotic hands and fingers, where precision is most critical. Each square centimeter contains 361 sensing elements, sampling data at up to 1,000 times per second. This density allows the sensor to detect fine variations in pressure and contact, which the company claims approaches the sensitivity of human skin. Despite this complexity, the module is about 4.5 millimeters thick and integrates sensing, signal processing, and edge computing into a single package. In demonstrations, a robotic hand covered across the palm and fingers showed how continuous tactile coverage can replace the patchwork feel of conventional sensors.
HexSkin expands the same concept to larger surfaces. Its hexagonal, tile-like structure is designed to conform to curved and irregular shapes, making it suitable for humanoid robots or machines that interact with their environment using more than just their hands. By extending touch sensitivity across broader areas, robots can better detect contact, distribute force, and respond safely when bumped or leaned on.
This kind of artificial skin does not instantly make robots human-like, but it addresses a long-standing limitation in robotics. As machines move beyond controlled industrial settings into homes, healthcare environments, and shared public spaces, the ability to sense and respond to touch becomes increasingly important. Artificial skin systems like these suggest a future where robots rely less on rigid programming and visual estimation, and more on physical feedback that allows them to adapt in real time.